
La importancia del piloto automático de un barco aumenta con la duración del viaje.

La mayoría de los navegantes utiliza su velero principalmente durante los fines de semana o vacaciones donde los voluntarios al timón no faltan y el piloto se usa relativamente poco.
En cambio, en solitario, o en viajes largos con tripulación reducida, poder soltar la caña es condición necesaria para la calidad de vida a bordo y la seguridad
Es aquí donde el piloto automático se vuelve un aliado indispensable y saber elegirlo es fundamental.
¿Cómo funcionan?
Todos los pilotos automáticos tienen el mismo principio de funcionamiento:
Dependen de un compás digital que toma el rumbo del barco y mediante un dispositivo electrónico compara esta información con el rumbo que se desea mantener.
La diferencia de ángulo es corregida por un dispositivo electromecánico o hidráulico que actuará sobre el timón.
El piloto además tiene un sensor de ángulo que le permite al sistema electrónico de control identificar el ángulo que forma el timón con el eje de crujía.
Este sistema electrónico de control es más complicado de lo que en un principio puede parecer. Cuando está corrigiendo el rumbo, debe tener en cuenta el tiempo de reacción de la pala del timón y dejar de corregir antes de llegar al rumbo correcto, pues si actuara corrigiendo hasta llegar al rumbo deseado, el barco seguiría girando por inercia, y entonces el piloto tendría que empezar a corregir en sentido contrario, lo que daría como resultado una trayectoria zigzagueante sin sentido.
Tipos de pilotos automáticos
Básicamente hay dos tipos de pilotos automáticos: De cockpit o Internos
Los de cockpit se instalan directamente sobre la caña del timón o en la rueda de gobierno
Los internos o In-board van montados debajo de la cubierta con sistemas hidráulicos que actúan directamente sobre la mecha del timón. Estos pilotos están pensados para barcos de mayor desplazamiento.
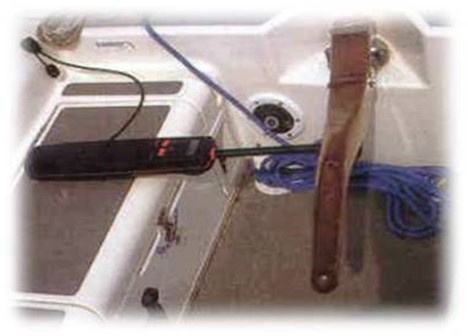
Pilotos de Cockpit

Son pequeños, contienen generalmente toda la electrónica y el motor en una sola unidad y se instalan en el cockpit controlando la caña o el timón de rueda.
Los de caña se montan directamente en ella y constan de un solo módulo que incluye el compás, el motor y la biela de empuje.
El motor es pequeño y poco potente y sólo resultan útiles en los barcos de hasta 9 toneladas
El motor eléctrico está conectado a una biela de empuje que se despliega o se repliega para desplazar a la caña del timón.
Cómo han sido diseñados para un consumo reducido de energía su fuerza debe multiplicarse mediante engranajes antes de aplicarla a la biela de empuje.
Por este motivo son ruidosos y de movimientos lentos. Tardan una decena de segundos en llevar el timón de un lado a otro.
Y esta lentitud de respuesta es su talón de Aquiles, ya que con mal tiempo lo que se necesita es capacidad de corrección rápida.

En funcionamiento normal, esto pilotos tienen un consumo moderado, pero con grandes cargas su consumo puede ser de unos 3 amperios hora.
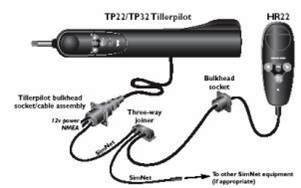
En los modelos más grandes, la unidad de control y el compás son módulos separados que pueden conectarse con otros instrumentos mediante enlace de datos.
Los pilotos automáticos para rueda de timón son similares a los de caña y sólo difieren en que las correcciones del rumbo las realiza una correa de transmisión en vez de una biela
La correa dentada actúa sobre un motón giratorio acoplado a la rueda del navío.
Estas correas a veces se destensan y dan problemas. Por ello algunos fabricantes han diseñado modelos que integran la corona y el motor, sin necesidad de correas.
Pilotos Internos o In board
Estos pilotos inciden directamente en el timón utilizando bielas de empuje o sistemas hidráulicos con potentes motores conectados al eje del timón
Tienen una unidad de control, un compás, una computadora de control y una serie de accesorios opcionales
Son más caros, consumen mucha más energía y están destinados a embarcaciones de mayor porte.
Dependiendo del sistema de timón principal existente se utilizan bielas de avance mecánicas o hidráulicas.
Funcionan de la misma manera que los anteriores, pero los actuadores mecánicos sobre el timón son capaces de generar mucha más fuerza (de 200 a 800 kilos) y los distintos sensores de medición y centrales de cálculo, en vez de estar integrados, son elementos separados en su instalación

En muchos casos la central de cálculo toma datos también del GPS, el medidor de viento y anemómetro para tratar toda la información y dar una respuesta de control más precisa.
Se instala lo más próximo al centro de gravedad del barco y lo más bajo posible. Así se verá menos afectado por las guiñadas
La elección del piloto automático
¿Cockpit o In board?
Esta decisión depende fundamentalmente del tamaño del barco y su desplazamiento (más de 9 toneladas).
Hay que considerar también el uso previsto. Para travesías moderadas, digamos Buenos Aires-Punta del este pueden considerarse los timones de bañera.
Pero si la travesía ha de ser extensa, costa de Brasil por ejemplo, debería pensarse en un piloto de instalación interna
El piloto In-board, no molesta en la bañera, está mejor protegido y su modo de fijación permite una acción precisa y eficaz a largo plazo. Por todos estos motivos, es el preferido por los regatistas o las tripulaciones de altura.
Por el contrario, el piloto de bañera, es un producto económico (tres o cuatro veces más barato que el in-board) y más cómodo para una utilización normal pero, su eficacia es menor cuanto mayor es el tamaño de la embarcación.
Los fabricantes especifican sus modelos más potentes para barcos que no superen las 9 toneladas e incluso esto puede parecer optimista en condiciones de funcionamiento más difíciles.
Por lo que no es aconsejable elegir un piloto de cockpit en barcos de más de 34 pies.
Si es de cockpit: ¿Qué potencia?
Para calcular la potencia tenga en cuenta el desplazamiento de la embarcación y atienda a las recomendaciones del fabricante pero no la tome al pie de la letra.

Relativice considerando cómo se desarrollará el gobierno en condiciones reales de navegación.
Piense que, por ejemplo, adquirir un piloto automático para un desplazamiento, en sí mismo, no tiene sentido, cuando el peso real de la embarcación lista para la mar puede superar hasta en un 20% del que resulta de su registro en seco.
Por ello, la única regla imperativa es que no hay que colocar un modelo demasiado pequeño para las características del barco, porque supondría tanto un mal control del rumbo como un desgaste prematuro del material.

Pensemos que, un pequeño piloto de caña diseñado para un 27 pies puede llevar un barco de 50 pies cómodamente en una calma chicha pero no cuando las condiciones de tiempo empeoran.
Consumo de energía
El peor enemigo de todos los pilotos automáticos es la batería
Los fabricantes basan las cifras de consumo promedio para el piloto automático de bañera en un ciclo operativo del 25 %.
Ello significa que por cada hora de uso del piloto, el barco es gobernado “activamente” durante 15 minutos y que es abandonado a su rumbo sin acción alguna durante los 45 minutos restantes.
Estas cifras son optimistas. Las situaciones reales nunca son las “promedio” y el consumo de energía real siempre es superior.
En los viajes de un día el consumo de energía no es problema pero, si realizamos grandes travesías, la gestión de la energía es vital, puesto que todo el consumo de energía que se realiza a bordo debe generarse a bordo y el impacto de un piloto automático será importante en el presupuesto energético total.

Esto supone un gran dilema y se corre el riesgo de elegir un modelo de bajo consumo para un barco relativamente pesado.
Esto afectará el rendimiento y la gobernabilidad
Es imposible obtener la máxima eficacia de gobierno con un mínimo consumo de energía. Cada opción tiene su precio!
Evitar la pérdida de energía
Para evitar un mayor gasto de energía, tendremos que optimizar el velero al máximo cuidando que el piloto corrija el rumbo lo menos posible
Para ello debemos cuidar el trimado de las velas. Un barco bien equilibrado tiende a orzar menos.
Durante la travesía, conviene cada tanto, desmontar el piloto y verificar si el equilibrio del barco a cambiado.
No hay que obsesionarse con el rumbo. Cuanto más exacto se lo pretenda, mayor será el trabajo que deba realizar el piloto automático.
Hay que permitir una gama de movimientos más amplia antes de que el piloto intervenga activamente.
En la práctica, basta con aumentar el ángulo para el cual el barco puede desviarse del rumbo fijado.
Y por último conviene afinar la Precisión del software. Cuanto más afinados estén los algoritmos del ordenador de navegación, menor será el consumo.
Los límites de los pilotos automáticos

No sobrestime el poder y capacidad del piloto automático.
Hay tripulantes que se quejan porque su piloto de caña no es capaz de mantener el rumbo en un pampero por popa con olas de dos metros.
Es imposible que alguno de estos instrumentos de cockpit pueda reaccionar tan velozmente como un humano anticipando la ola simplemente porque no puede verla.
En condiciones de mal tiempo, el piloto automático, con su comportamiento de contratimón siempre regular, apenas podrá dominar la situación. Y no existe un piloto automático con cambio de marchas ni distintos grados de fuerza.
Además, hasta los mejores pilotos automáticos deben esforzarse cuando se enfrentan a un viento cambiante.
Ello se debe a que no detectan los pequeños cambios en la dirección del viento. La única solución es fijar una ruta más cómoda derivando, lo cual, lamentablemente, significa pérdida de distancia hacia barlovento.
Conclusión
La única manera de asegurarse el buen gobierno de un piloto automático consiste en comprar un sistema veloz y potente.
Esto garantiza el gobierno en todas las condiciones de viento y mar pero, también implica un mayor gasto de energía
En última instancia, cada patrón debe decidir, teniendo en cuenta los presupuestos energéticos y las exigencias diarias de potencia, cuál es la solución que responde mejor a sus necesidades específicas.
Lic. Florencia Cattaneo
Campo Embarcaciones
Bróker Náutico
Fuentes:
Peter Christian Förthmann; Gobierno Automático en Veleros
pág web fondear; El piloto automático
Alex Oucinde; La elección del piloto automático
Oliver Le carrer; El Crucero costero y de altura